Um GPS para um Growing Robô
Por: Rafael Lopes
Robôs têm-se tornado cada vez mais uma parte imprescindível da medicina do futuro. Normalmente, quando se mencionam robôs médicos a primeira imagem que se materializa nos nossos subconscientes é a dos braços robóticos utilizados em cirurgias, mas estes são apenas um pequeno grupo dentro de um muito maior universo de robôs médicos.
Uma classe de robôs mais entusiasmante, é a que inclui os robôs que se utilizam como sondas para exames internos. Este grupo é um dos mais inovadores, a natureza do seu trabalho leva a que estes tenham de ter um design simultaneamente resistente e não intrusivo. Estes dois requisitos levaram à criação daquilo que se chama Continuum Robots ou Growing Robots.
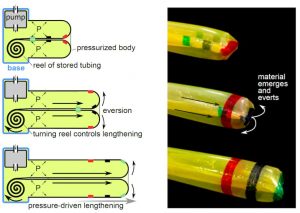
Esquema de um Growing Robot e do seu funcionamento.
Estes assistentes artificiais são compostos por materiais resistentes e flexíveis, como nylon, e são originalmente muito pequenos, pois encontram-se enrolados como se fossem uma meia. Durante o exame esta “meia” desenrola-se, graças a um fluído pressurizado, que gradualmente a expande. Enquanto expande, este robô molda-se às cavidades e às paredes dos canais do corpo que está a analisar. Esta técnica aumenta a segurança deste tipo de testes, especialmente em zonas como artérias cerebrais. No entanto, esta vantagem tem associada um problema de eficácia relacionado com a sua falta de rigidez estrutural. Ao contrário de um robô clássico, que é rígido e tem comprimento permanente, estes robôs que crescem, ao moldar-se a um canal particular, apresentam uma forma não reta e isto impede que investigadores e médicos saibam a sua forma e disposição dentro do corpo.
Este foi o desafio que a equipa de Tania Morimoto (professora de engenharia mecânica da Jacobs School of Engineering da Universidade da Califórnia, em São Diego) e do seu colaborador Connor Watson (estudante de PhD. de Engenharia Mecânica) tentaram ultrapassar. Morimoto e Watson queriam desenvolver um mecanismo simples e barato, que permitisse localizar a posição do robô e reconhecer a forma que tomou dentro do corpo sem recorrer a qualquer tipo de radiação. Deste modo, criaram uma pequena extensão magnética que posicionaram na ponta do protótipo. Esta ponta magnética, enquanto se encontra no interior do corpo, irá interagir com quatro sensores de indução magnética que utilizam a interferência que a ponta magnetizada em conjunto com diversos campos magnéticos, conseguindo assim criar um modelo computacional que localiza a “ponta” do robô.
Robô Protótipo de Tania Morimoto e Connor Watson.
Para além deste trabalho, a equipa aperfeiçoou o seu modelo ao “ensinar” o neural network a reconhecer a diferença entre a posição onde os sensores detetam a ponta magnética e a posição real da mesma, de modo a aperfeiçoar e ajustar os seus resultados, tudo isto com um custo de aproximadamente 100 dólares. Os resultados de Morimoto e Watson foram publicados em Abril 2020 na IEEE Robotics and Automation.
FONTES:
Watson, Connor & Morimoto, Tania. (2020). Permanent Magnet-Based Localization for Growing Robots in Medical Applications. IEEE Robotics and Automation Letters. PP. 1-1. 10.1109/LRA.2020.2972890.
SciTechDaily | Low-Cost, High-Accuracy GPS-Like System Developed for Flexible Medical Robots
LiveScience | Magic Bots: Vine-Inspired Robots Can Grow on Demand